时间:2012-09-21 返回列表
温馨提示:如果您对我们的产品、服务感兴趣,或者有什么可以帮助您的,您可以点击 在线咨询与我们在线交谈或者拨打我们的客服电话:0371-6777 2626
摘要:基于Solidwork/motion作为设计平台,复摆式破碎机建立了产品数字化模型,对模型及破碎过程进行了运动学模拟仿真,得到了其运动规律,进行了动力学配重计算。实现了破碎机Solidworks模型转化3DSMAX模型,建立了破碎机破碎矿石过程仿真模型,能清楚地看到破碎机破碎矿石过程的整体状况及工作原理。
复摆颚式破碎机的三维建模,首先必须进行零件和部件的建模。部件包括机架部件、偏心轴部件、动颚部件等。其后进行装配建模。
在破碎机的三维总装配中,运用了自底向上的装配体设计思想。所谓自底向上是利用已经建立好的零件设计装配体。装配体的设计正好像一个装配车间,利用已加工完成的零件,根据不同的位置和装配约束关系,将每个零件装配完成部件或产品。
为了动态仿真的需要,进行总装配之前,首先必须知道零件中哪些为不动件,哪些为可动件。将不动零件装配在一起形成机架部件,而为了仿真需要,将破碎机进行简化,将一些调节的螺栓设置为不动件。完成整机装配的虚拟样机如图1所示。

在破碎机系统中,添加的约束有50多个,破碎机的约束类型取决于破碎机装配时装配约束关系。在破碎机中,动颚与推力板之间的约束为铰链约束,弹簧和拉杆之间为圆柱副约束,偏心轴和机架为圆柱副约束,动颚与偏心轴之间为圆柱副约束。
动力学仿真中载荷的添加是一个重要的环节,Motion中载荷可以产生机械的运动或者减小运动。Motion中载荷主要分为:外界作用力、相互作用力、重力和动颚上加载的力。
Pmax=0.1qHL
Pjs=1.5Pmax
H———破碎腔的高度;
L———破碎腔的长度;
q———衬板单位面积上的平均压力。
经计算得PE400×600 破碎机的Pjs=1843kN, Pmax=1450kN。
在破碎机中,由于在拉杆上是靠弹簧的受压产生拉力,因此在定义拉杆上弹簧力时,首先给定一个起始压力,然后根据破碎机的设计时给定力的大小和弹簧受压的深程度,定义弹簧力。在PE400×600 型号中,起始压力为5488N,长度为215 mm,当受压到135mm 时,受力为15660N。
在Motion中,提供了一个材料数据库,可以从中选择材料赋给所需要的零件。当零件材料比较特殊时,Motion提供了材料的添加功能,可以根据所需材料的属性定义一个新材料添加到材料库中,属性包括密度、比热、刚度、弹性等。
在破碎机中,给每一个零件都根据实际定义了材料属性。偏心轴是40Cr合金钢,机架和动颚、轴承盖是ZG35,活动和固定齿板是ZGMn13,弹簧的材料是60SiMn,飞轮和皮带轮是HT20-40。
在破碎机中,破碎的动力是通过电机获得的。电机的运动带动皮带轮的转动,而皮带轮是用键跟偏心轴固定在一起,因此,给予皮带轮的运动就等同于给偏心轴的运动,破碎机的机架是固定的,于是,就可以在偏心轴和机架的圆柱副约束上添加沿Z轴的旋转运动。偏心轴的转速是匀速转动。如型号PE400×600的中碎破碎机,偏心轴转速为275r/min,添加此转速到皮带轮上。
在动态仿真时,为了获得理想的效果,必须对仿真进行设定,动画仿真的实质是静态的图片利用视觉的暂留现象一帧一帧地连续播放。因此,必须设定仿真的时间,仿真的起始帧画、结束帧画,前一副帧画到后一副帧画的间隔时间。在破碎机的动态仿真中,设置的仿真时间是10s,设置的动画帧数是500副。在仿真控制面板中,可以对仿真进行操作,如对仿真时间的修改等。
以型号为PE400×600的破碎机为例进行分析。在破碎机中,最重要的零件是动颚。动颚的运动对破碎机的破碎效果、破碎功率的消耗、破碎机零部件的损耗、破碎机的生产率等都有直接的影响。因此,将动颚作为研究对象进行分析。在动颚部件中,作为部件整体,将分析质心的运动,而作为特殊分析,以动颚在排料口和进料口处为分析对象。
以动颚部件的质心作为研究对象,分析动颚部件的运动,图2为动颚部件速度曲线图。
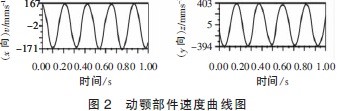
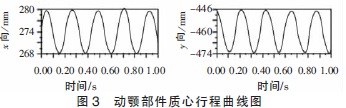
从图2中可以看出,动颚部件质心x方向的速度比较大值和最小值在正负0.17m/s左右y方向的。速度比较大值和最小值在正负0.4m/s左右。从图3动颚部件质心行程曲线图中得到,质心x方向的行程大致为12mm,而y方向的行程为28mm左右。y方向与x方向行程的比值为2.3左右。
动颚部件质心的加速度分析,在破碎机运动中,整个破碎机的动态平衡是至关重要的。对于动颚部件来说,在破碎机运转时会产生很大的惯性力,这种惯性力将在机器各运动副中引起一种动压力,因而会增加运动副中的磨损,影响构件的强度,降低机器的效率。此外,由于惯性力的大小和方向的周期性的变化,将使机器及其基础发生振动和偏心轴回转的不均匀性。在破碎机的动态平衡中,主要考虑在皮带轮和飞轮上添加对重的方法来消除惯性力的有害影响。在动颚部件上的惯性力如下:
P=-ma
M=-Jε
m———动颚部件的质量;
a———动颚部件的加速度;
J———动颚部件对其中心的转动惯量;
ε———动颚部件的角加速度。
将P和M合成一个不通过质心的总惯性力P1,其大小和方向与通过质心的P相同,但两者相距一垂直距离h=M/P
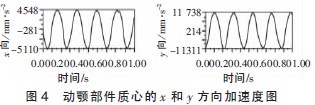
总惯性力P1的方向可以根据质心的加速度方向确定,加速度方向可以根据质心处x方向和y方向的加速度大小确定。如图4所示,根据曲线图,利用Motion中的功能,将其导入Excel表格中,从表格中读取数据,根据力的合成原理,就可以得到力的大小和方向。
动颚部件的总惯性力P1由偏心轴和肘板承受,然后再传给机架及其基础,将P1分解为偏心轴上(机构中曲柄和动颚连接点)的力和肘板上的力。在加速度的值中,取出12个点分析,求出每一点在偏心轴上的分力T,其后取平均值Tpj。
对重的位置在偏心轴偏心部分的相反位置上,对重的重量如下:
![]()
r0———对重重心到偏心轴轴;
r———偏心距;
n———偏心轴转速;
G1———偏心轴偏心重量;
Tpj———惯性力分力T的平均值。
根据上面的公式,以破碎机PE400×600为例计算,选取破碎机中的12个位置,根据仿真结果,动颚部件质心处的加速度和角加速度如表所示。
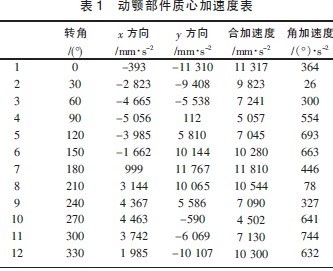
动颚部件的质心位置的坐标为x=-209,y=750,动颚部件的质量为1139kg,相对于重心的转动惯量为377kg/m2,偏心轴的偏心质量为18.76kg。根据计算得到对重的质量G=23.9kg,质心位置在离轴心位置387mm处,即r0=387。
根据计算的对重添加到飞轮和皮带轮上,可以减小破碎机工作时的振动,有利于破碎机的动态平衡。在大多数情况下,对重做成弓形或扇形。对重可以与飞轮和皮带轮的轮缘铸成一体,也可以用螺钉连接。
破碎机运动仿真的实现使得破碎矿石的过程形象逼真,能清楚地看到破碎机破碎矿石过程的整体状况及工作原理;提供仿真电机与破碎机之间的连接与装配,以及传送带的运动,能够全方位地观察各设备间的装配关系。建立破碎机破碎矿石过程仿真模型方法,在三维软件Sloidworks做好三维建模,然后将模型转化成AutoCAD模型,再将AutoCAD模型转化3DSMAX模型。因为AutoCAD与3DSMAX 同是Aulodesk公司的产品,其坐标系是兼容的,可以方便地交换数据。